
- Product Details
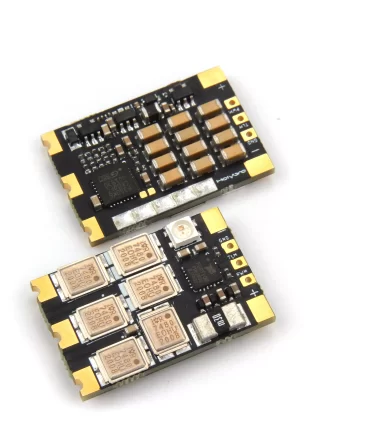
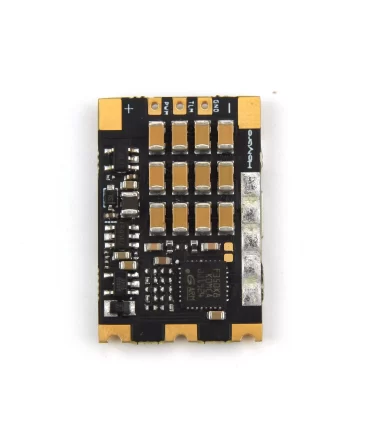
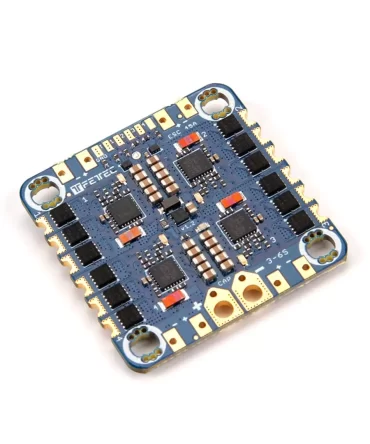
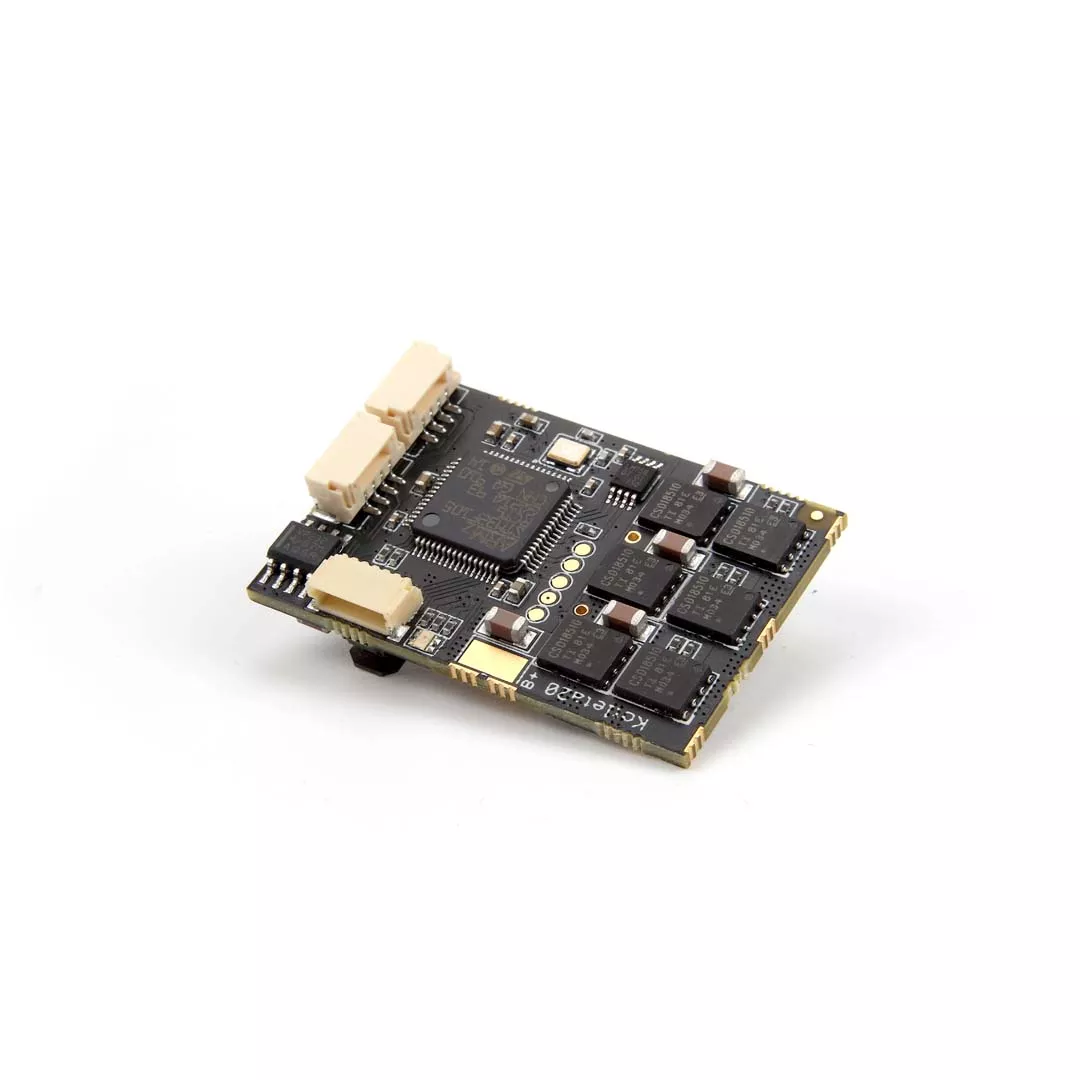
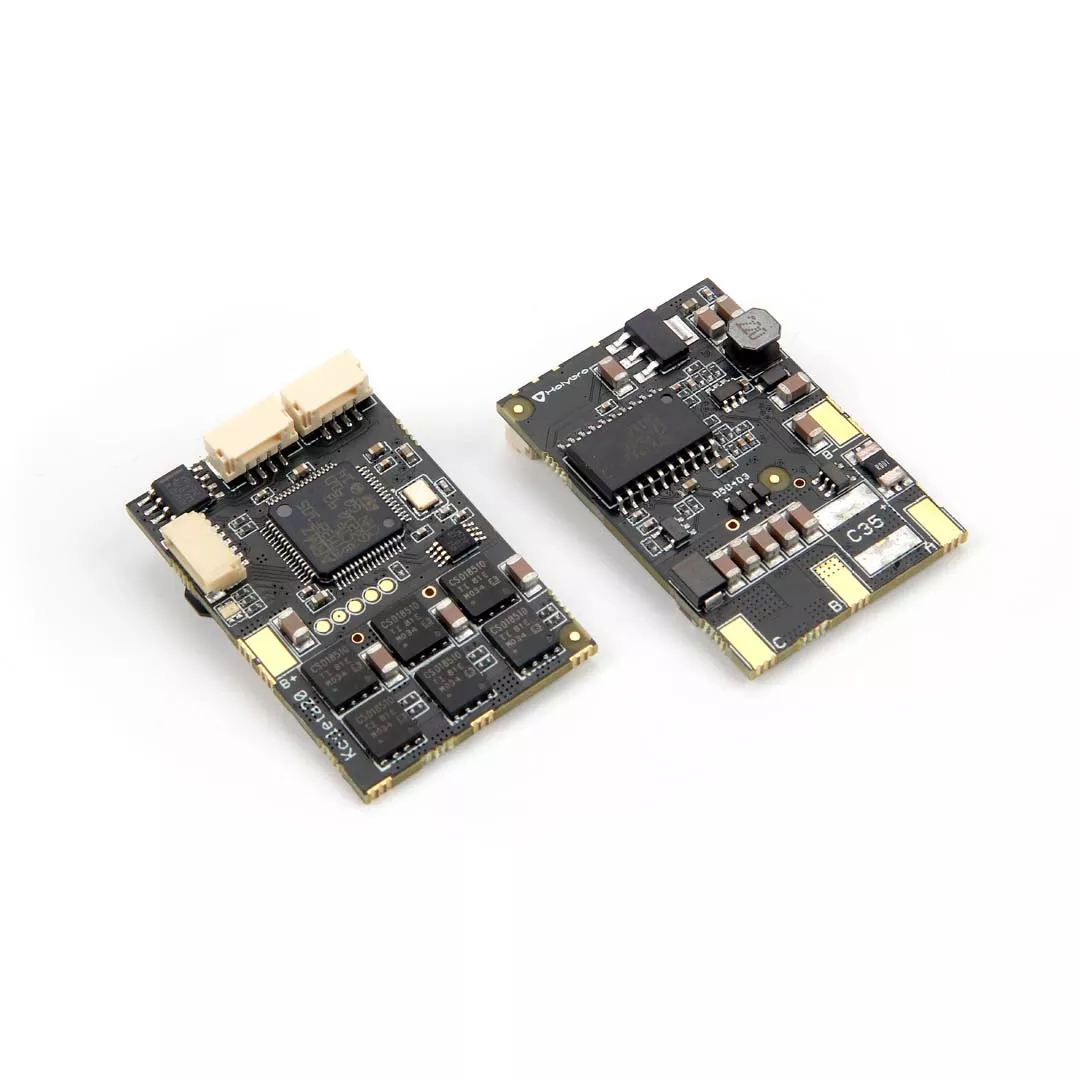
Kotleta 20 has one CAN bus with two sockets onboard.
Features
• Excellent dynamic characteristics.
• Regenerative braking and active freewheeling.
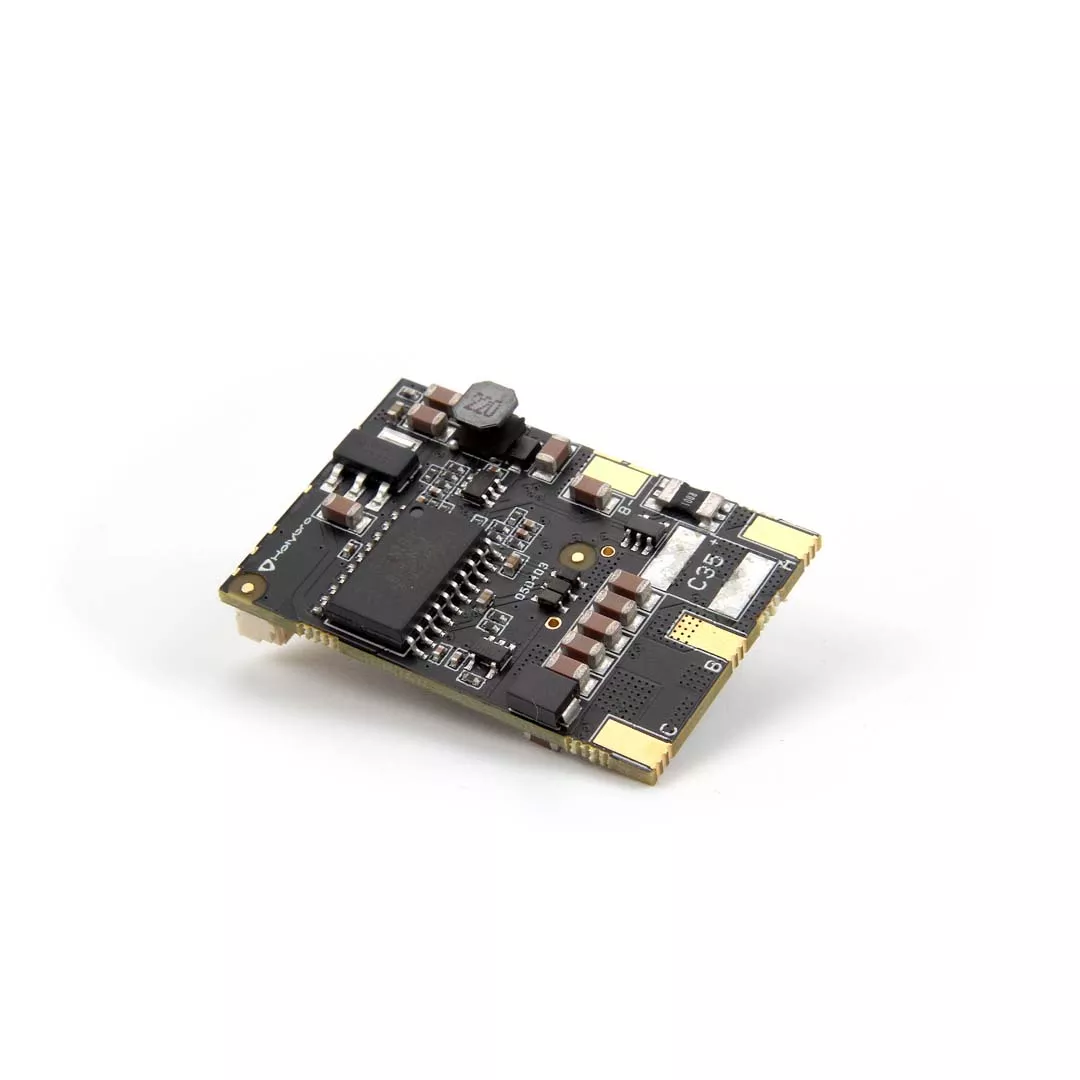
• 500 W continuous power output at 8.8 g weight.
• Optional RPM control loop (RPM governor).
• Self diagnostics and health status reporting.
• Highly configurable.
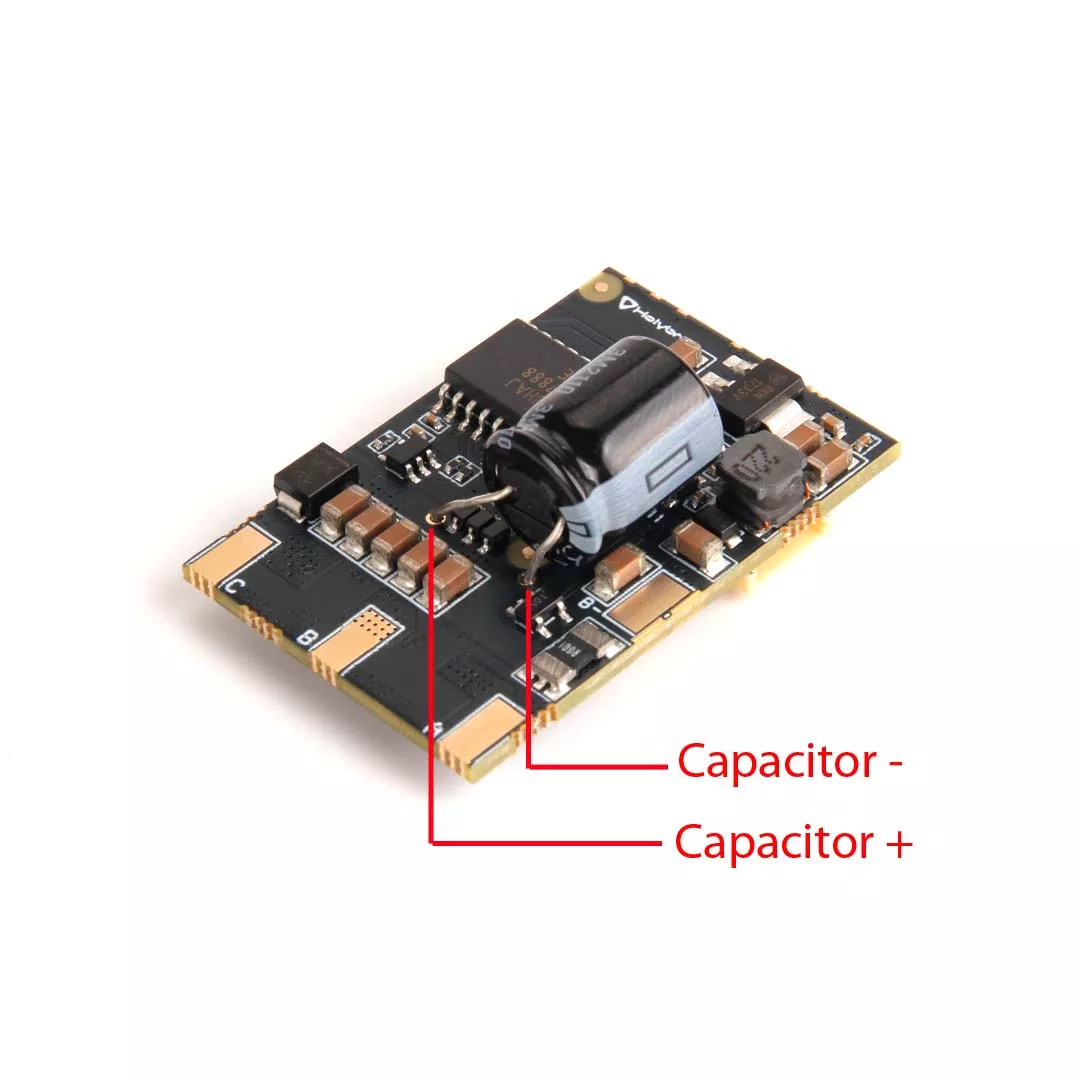
• Low noise and low current ripple due to the low-ESR embedded filtering capacitors and highfrequency PWM.
• Supported interfaces:
• CAN (ISO 11898-2)
• UART.
• RCPWM (analog PWM interface widely used in robotics).
• High quality assurance:
• Protection against unlicensed (counterfeit) production by means of a digital signature installed on every manufactured unit.
• Open source firmware – Sapog (3-clause BSD license).

Dimension

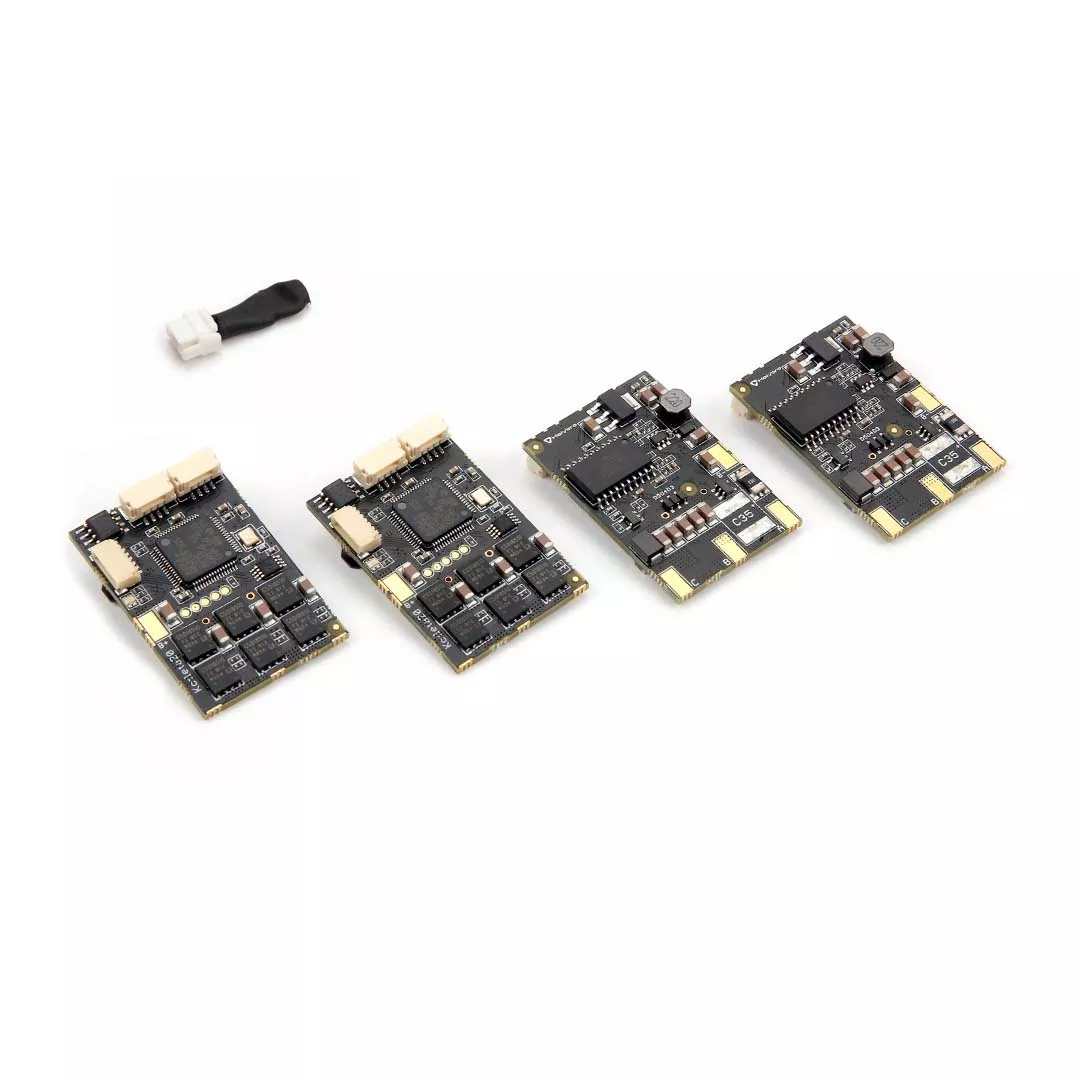
Package included:
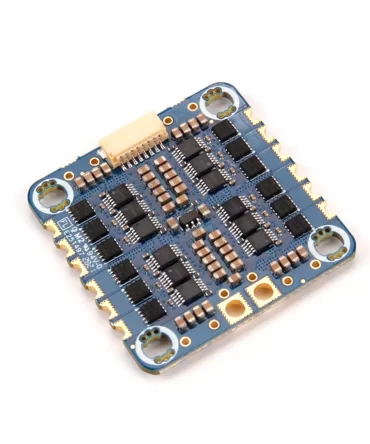
• Kotleta 20 ESC*4 (Combo)
• 100 mm long 16 AWG wires(Red) *4
• 100 mm long 16 AWG wires(Black)*4
• Electrolytic capacito: 220uF 35v *4
• 4 to 4 pin cable (CAN) *4
• 6 to 6 pin cable(Debug) *1
• Micro termination plug *1
Download:
Kotleta20 datasheet.pdf
Sapog_v2_Reference_Manual.pdf
UAVCAN_Specification