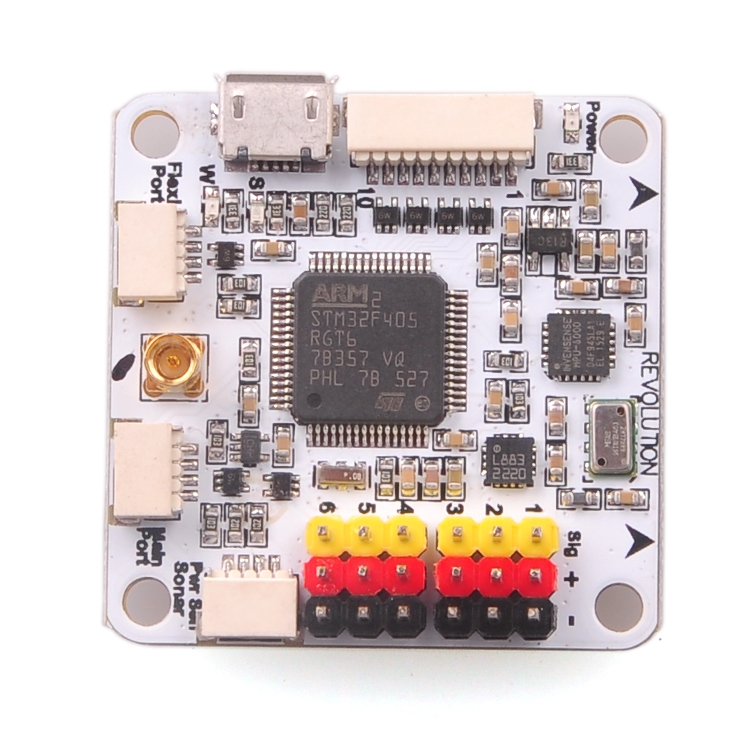
The OpenPilot Revolution board, also called ‘Revo’, is a new breed of Autopilot using the STM32F4 series, 210MIPS ARM Micro-controller. It contains a hardware floating point unit (FPU)which is a huge advancement for hobby-class autopilots. OpenPilot has been 32bit since day one, and the FPU is another step up the performance ladder. The FPU allows precise, low-latency processing of real-life measurements using advanced attitude estimation algorithms.
The Revolution is a flight control computer with autopilot, intended for multirotors, helicopters and fixed wings. It is a full 10DOF with gyroscope, accelerometer, magnetometer and pressure sensors.
–Flexi-IO Port: JST-SH 10-pin. The receiver port can act as an input or output port depending on the configuration which is set in the Hardware Settings. Configuring the receiver port as an output port allows the user to assign more output channels then the 6 standard servo outputs.
–MainPort: JST-SH 4-pin. This is a serial USART whose baud rate can be adjusted through the GCS. Optionally, Futaba S.Bus receiver, Spektrum/JR satellite receiver or GPS can be mapped to the MainPort. Default configuration is Telemetry for connecting an RF modem.
–FlexiPort: JST-SH 4-pin. The function of this port also depends on the configuration and can be configured for I2C or Serial. The default configuration doesn’t use this port, but it can be used for Telemetry, GPS, Spektrum satellite receivers (all working), and other I2C peripherals (under development).
–RF Socket: Antenna connection socket for on-board OPLink modem.
–Pwr Sen/Sonar Port: JST-SH 4-pin. This port can be configured to accommodate an Autopilot current sensor and a low cost Sonar sensor such as the HC-SR04. It can also be used as a general purpose input/output port or as a one or two channel analog input port.