-
- Product Details
Update:
1.Durandal Flight Controller
The on-board sensor BMI088 on the Durandal has changed to ICM20602 until further notice.
Please note that this change does not affect the usage of the product.
2.GPS Module
The GPS RGB LED Driver Chip has been updated. This update does not affect Ardupilot users.
For PX4 Autopilot users, you will need to upgrade your PX4 firmware to Stable Release v1.12.2 or newer for LED driver Support.Product Features
Durandal is a new flight controller designed by Holybro utilizing the STM32H7 microcontroller series.
As increasing number of drone companies and developers need to run more powerful models and build on more embedded memory capabilities, Durandal is designed to offer the performance upgrade for development needs. The advantage will come in handy with intensive calculation features is required.
Harnessing from our extensive autopilot building experience in the past years, we have implemented new vibration absorption system into the mechanical design of the hardware, and integrated IMU heater for sensors temperator control.
Durandal is pre-installed with PX4, and also supported by other flight stacks such as Ardupilot.Technical Specifications
-
Main FMU Processor: STM32H743
-
32 Bit Arm ® Cortex®-M7, 480MHz, 2MB memory, 1MB RAM
-
-
IO Processor: STM32F100
-
32 Bit Arm ® Cortex®-M3, 24MHz, 8KB SRAM
-
-
On-board sensors
-
Accel/Gyro: ICM-20689
-
Accel/Gyro: BMI088
-
Mag: IST8310
-
Barometer: MS5611
-
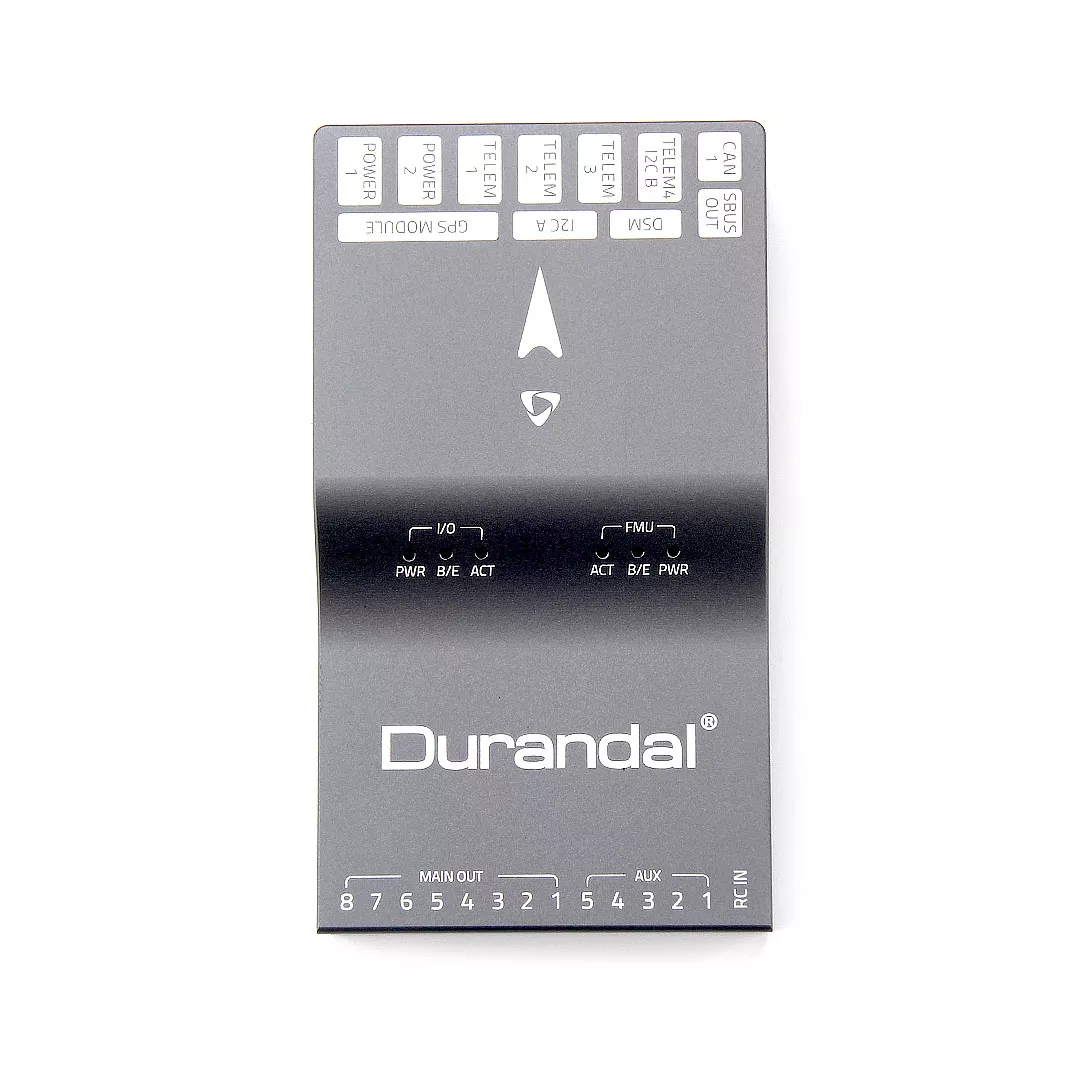
GPS: ublox Neo-M8N GPS/GLONASS receiver; integrated magnetometer IST8310serial port maping:
SERIAL0 -> USB
SERIAL1 -> UART2 (Telem1)
SERIAL2 -> UART3 (Telem2)
SERIAL3 -> UART1 (GPS)
SERIAL4 -> UART4 (Telem4 I2CB)
SERIAL5 -> UART6 (Telem3)
SERIAL6 -> UART7 (spare, debug)Electrical Data
Voltage Ratings:
-
Power module output: 4.9~5.5V
-
Max input voltage: 6V
-
Max current sensing: 120A
-
USB Power Input: 4.75~5.25V
-
Servo Rail Input: 0~36V
Mechanical Data:
-
Dimensions:80*45*20.5mm
-
Weight: 68.8g
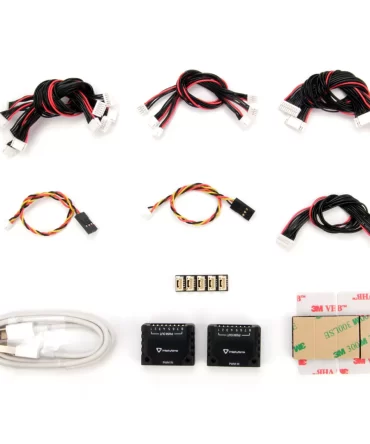
Package Included(20081&20082)

Durandal *1
GPS Modul *1 (Optional)
PM02 Power Management Board *1
I2C splitter Board *1
6 to 6 pin cable (power) *5
4 to 4 pin cable (CAN) *2
10 to 10 pin cable (CAP&ADC) *1
7 to 7 pin cable(SPI) *1
“Y”6 to 4 pin & 4 pin cable *1
DSMX receiver cable *1
PPM/SBUS out cable *1
XSR receiver cable *1
SBUS receiver cable *1
USB (type-c)cable *1
Foam Set *1
Durandal Pinouts *1
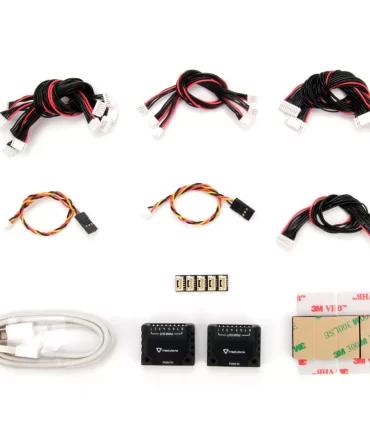
Power Management Board Quick Start Guide *1Package Included(20093&20094)

Durandal *1
GPS Modul *1 (Optional)
PM07 Power Management Board *1
I2C splitter Board *1
6 to 6 pin cable (power) *5
4 to 4 pin cable (CAN) *2
10 to 10 pin cable (CAP&ADC) *1
7 to 7 pin cable(SPI) *1
“Y”6 to 4 pin & 4 pin cable *1
DSMX receiver cable *1
PPM/SBUS out cable *1
XSR receiver cable *1
SBUS receiver cable *1
USB (type-c)cable *1
Foam Set *1
Durandal Pinouts *1
Power Management Board Quick Start Guide *1For PX4 Flight Stack:
Please use QGroundControl whose version is later than V 3.5.6 to flash the firmware. Only PX4 developer build (master) is supported now.
https://docs.px4.io/master/en/flight_controller/durandal.htmlFor Ardupilot Flight Stack:
Take arducopter for example, please download the apj file in the following directory and install it with Missionplanner (custom firmware file).
https://firmware.ardupilot.org/Copter/stable/Durandal/Downloads:






Durandal
$405.90
(In stock)
Durandal is a new flight controller designed by Holybro utilizing the STM32H7 microcontroller series.
In stock
| Optional items | Pixhawk 6C + PM02 V3, Pixhawk 6C + PM02 V3 + M8N GPS, Pixhawk 6C + PM07, Pixhawk 6C + PM07 + M8N GPS |
|---|
Related Products
-
-
Pixhawk 6X
Fiyat aralığı: $29.70 - $132.00 Bu ürünün birden fazla varyasyonu var. Seçenekler ürün sayfasından seçilebilir -
-
Pixhawk 6C (Aluminum Case)
Fiyat aralığı: $440.53 - $557.68 Bu ürünün birden fazla varyasyonu var. Seçenekler ürün sayfasından seçilebilir -
-
Spare Parts-Pix32 v5 cable set
Fiyat aralığı: $19.80 - $21.45 Bu ürünün birden fazla varyasyonu var. Seçenekler ürün sayfasından seçilebilir