



- Product Details
For PX4 Autopilot users, you will need to upgrade your PX4 firmware to Stable Release v1.12.2 or newer for LED driver Support.

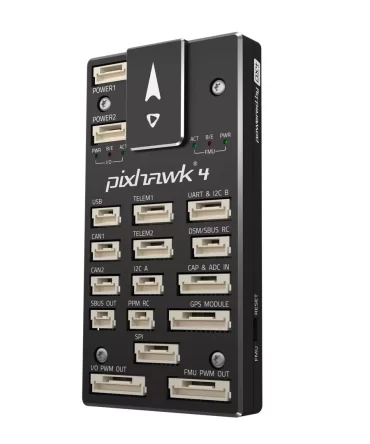
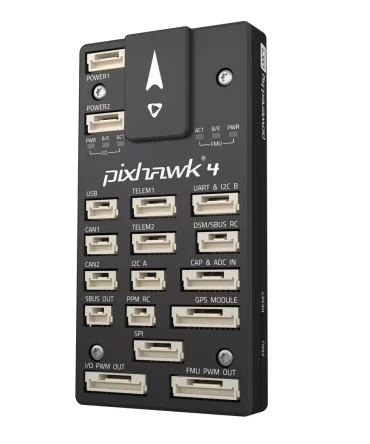
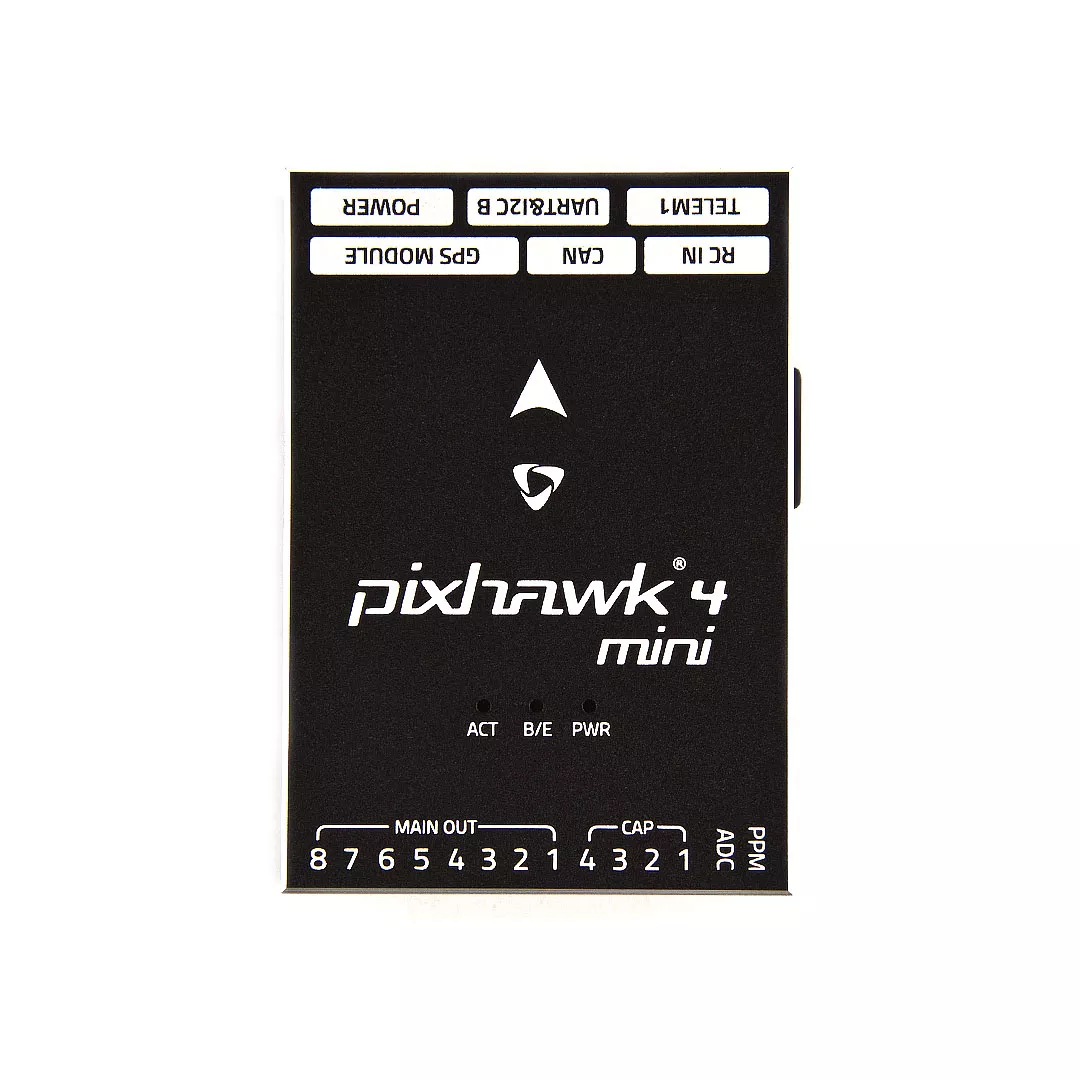
Pixhawk 4 Mini
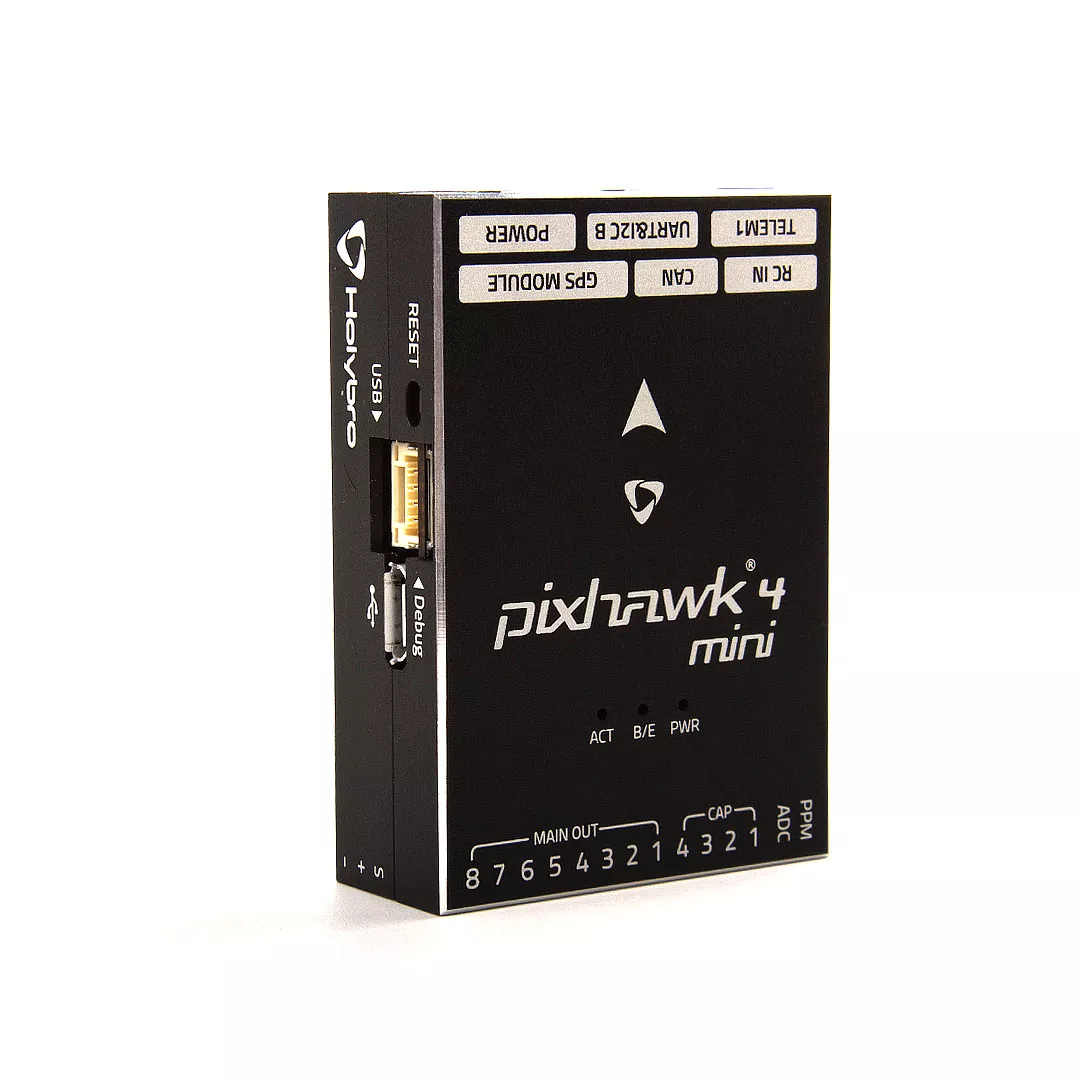
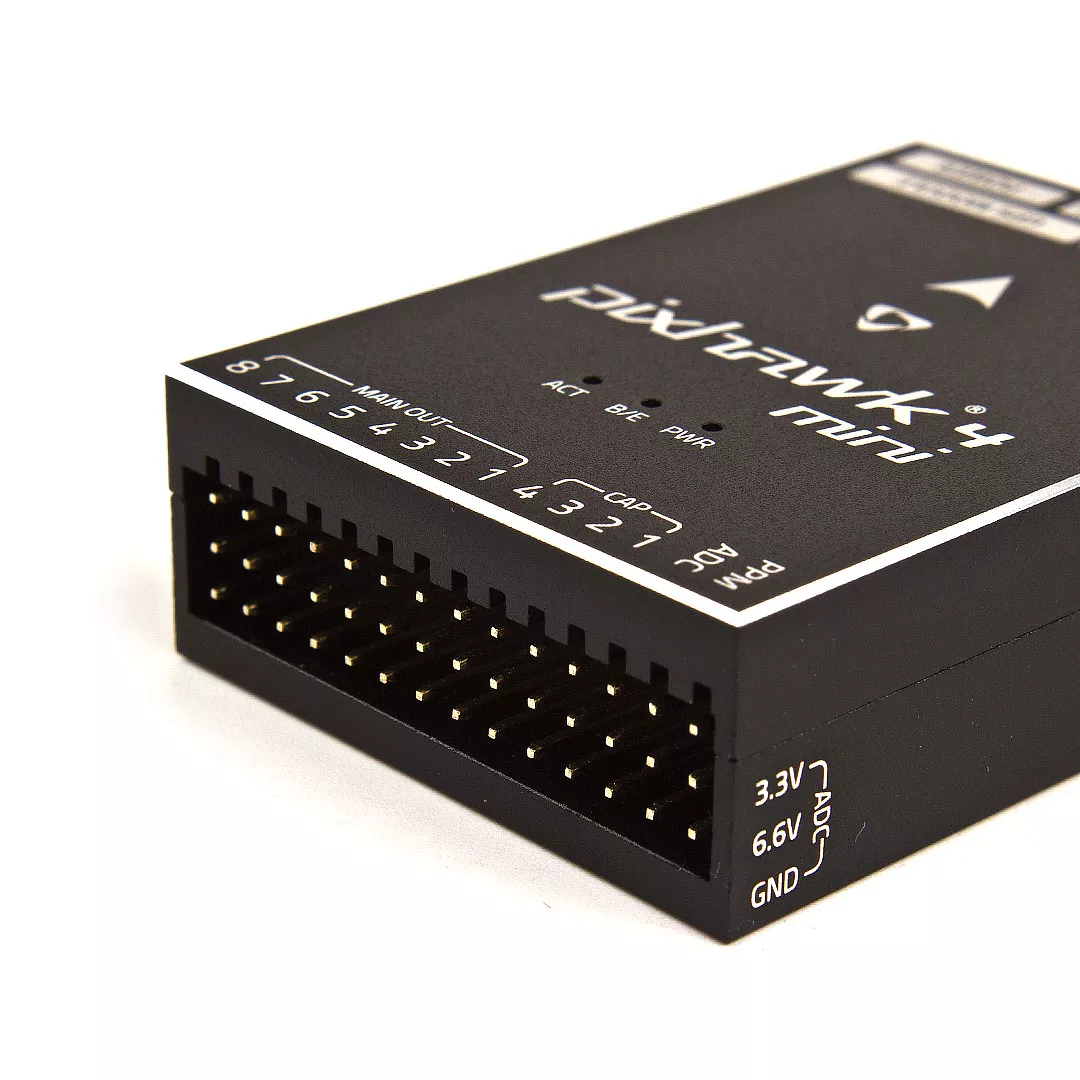
The Pixhawk® 4 Mini autopilot is designed for engineers and hobbyists who are looking to tap into the power of Pixhawk 4 but are working with smaller drones. Pixhawk 4 Mini takes the FMU processor and memory resources from the Pixhawk 4 while eliminating normally unused interfaces. This allows the Pixhawk 4 Mini to be small enough to fit in a 250mm racer drone. The Pixhawk 4 Mini is easy to install; the 2.54mm (0.1in) pitch connector makes it easier to connect the 8 PWM outputs to commercially available ESCs.
Pixhawk 4 Mini was designed and developed in collaboration with Holybro® and Auterion®. It is based on the Pixhawk FMUv5 design standard and is optimized to run PX4 flight control software.
Product Features
- Half the footprint of the Pixhawk® 4
- The same FMU processor and memory resources as the Pixhawk 4
- Aluminum casing for great thermal performance
- Easy to connect to commercial ESCs
- The latest sensor technology from Bosch® and InvenSense®
- Redundant IMUs for reliable performance
- NuttX real-time operating system
- Pre-installed with the most recent PX4 firmware
Technical Specifications
- FMU Processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- On-board sensors
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI055
- Mag: IST8310
- Barometer: MS5611
- GPS: ublox Neo-M8N GPS/GLONASS receiver; integrated magnetometer IST8310
Electrical Data
Voltage Ratings
- Power Brick Input: 4.75~5.5V
- USB Power Input: 4.75~5.25V
- Servo Rail Input: 0~24V
- Max current sensing: 120A
- Current consumption: less than 250mA @ 5V
Mechanical Data
- Dimensions: 38x55x15.5mm
- Weight: 37.2g
Package Included (SKU20054)
 Pixhawk4 mini *1
Pixhawk4 mini *1
Pixhawk4 GPS MODULE *1
PM06 V2 Power Management Board *1
I2C splitter Board *1
6 to 6 pin cable (power) *2
4 to 4 pin cable (CAN) *1
6 to 6 pin and 4 pin “Y”cable *1
6 to 6 pin cable(Debug) *1
PPM/SBUS out cable *1
XSR receiver cable *1
DSMX receiver cable *1
SBUS receiver cable *1
USB cable *1
‘X’type folding pedestal mount *1
70mm & 140mm carbon rod stand off *2
Foam Set *1
Pixhawk4 mini Quick Start Guide *1
Package Included (SKU20055)
 Pixhawk4 mini *1
Pixhawk4 mini *1
PM06 V2 Power Management Board *1
I2C splitter Board *1
6 to 6 pin cable (power) *2
4 to 4 pin cable (CAN) *1
6 to 6 pin and 4 pin “Y”cable *1
6 to 6 pin cable(Debug) *1
PPM/SBUS out cable *1
XSR receiver cable *1
DSMX receiver cable *1
SBUS receiver cable *1
USB cable *1
Foam Set *1
Pixhawk4 mini Quick Start Guide *1
Some Tips:
Downloads:
Pixhawk 4 Mini Wiring Quick Start
Pixhawk 4 Mini Technical Data Sheet
Pixhawk 4 Mini_Pinouts
Pixhawk4-GPS-Quick-Start-Guide