- Product Details
Description
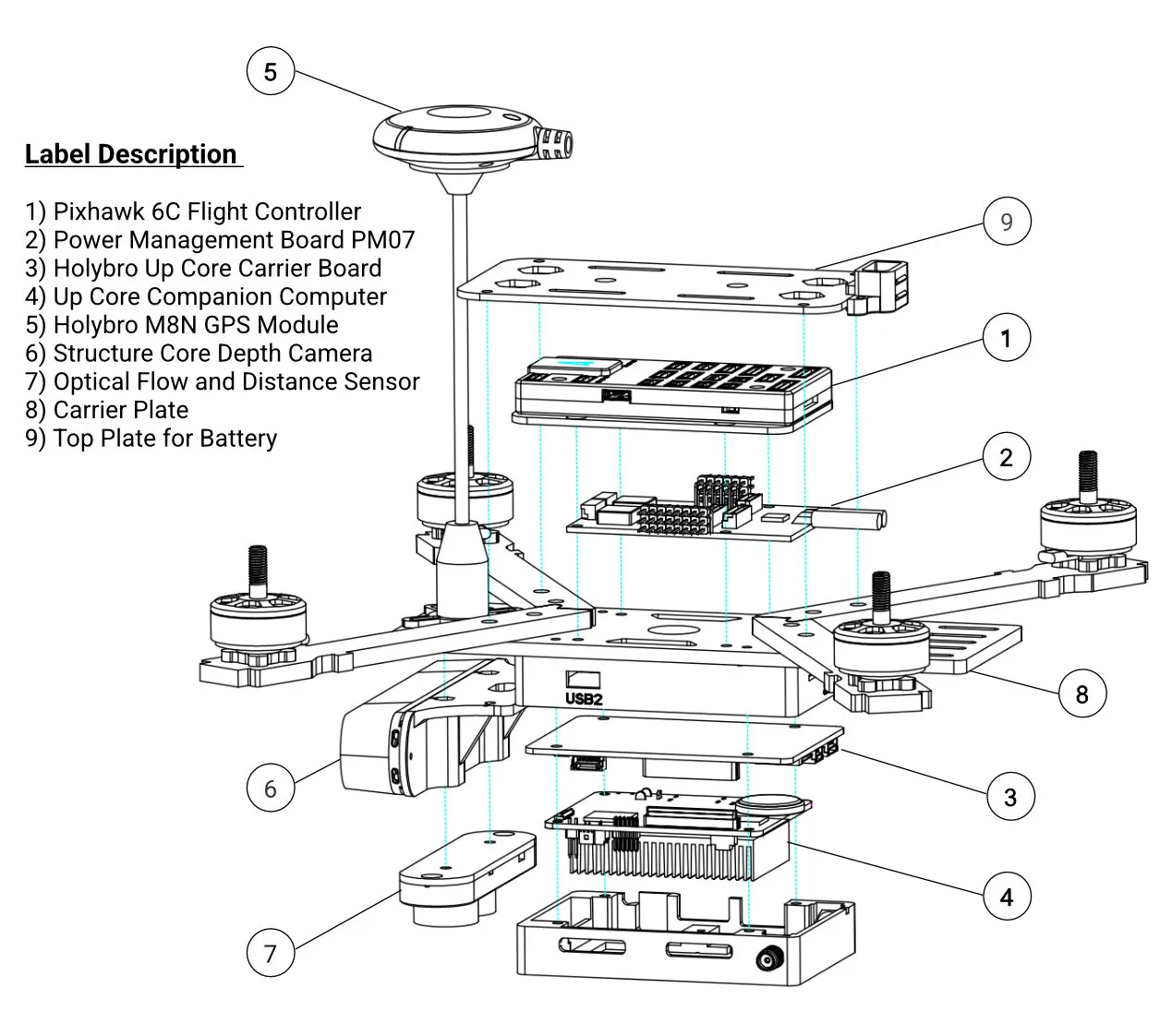
The PX4 Vision Autonomy Development Kit is a robust and inexpensive kit for enabling computer vision development on autonomous vehicles. The kit contains a near-ready-to-fly carbon-fiber quadcopter equipped with a Pixhawk 6C flight controller, a UP Core companion computer (4GB memory & 64GB eMMC), and a Occipital Structure Core depth camera sensor. Ships preassembled.
Note: This vehicle comes with no software preinstalled. There is a pre-imaged USB stick that has a reference implementation of the PX4/Avoidance local planner software provided by Auterion. This is a basic software used only as a reference to show the basic function the PX4 vision can do. Developers can use the kit to try out other features provided by the PX4 Avoidance project, modify the existing code, or experiment with completely new computer vision-based functionality.

The PX4 Vision Development Kit contains following components:
-
Core Components:
-
1x Pixhawk 6C flight controller (New with v1.5)
-
1x PMW3901 optical flow sensor (Thone ThoneFlow-3901U, connected via Telem3 Serial Port)
-
1x TOF Infrared distance sensor (PSK‐CM8JL65‐CC5, connected via GPS 2 Port)
-
1x Structure Core depth camera
-
160 deg wide vision camera
-
Stereo infrared cameras
-
Onboard IMU
-
Powerful NU3000 Multi-core depth Processor
-
-
1x UP Core computer (4GB memory & 64GB eMMC with Ubuntu and PX4 avoidance)
-
Intel® Atom x5-z8350 (up to 1.92 GHz)
-
Compatible OS: Microsof t Windows 10 full version, Linux (ubilinux, Ubuntu, Yocto), Android
-
FTDI UART connected to flight controller
-
USB1: USB3.0 A port used for booting PX4 avoidance environment from a USB2.0 stick (connecting a USB3.0 peripheral may jam GPS). -
USB2: USB2.0 port on a JST-GH connector. Can be used for second camera, LTE, etc. (or keyboard/mouse during development). -
USB3: USB2.0 JST-GH port connected to depth camera -
HDMI: HDMI out -
SD card slot
-
WiFi 802.11 b/g/n @ 2.4 GHz (attached to external antenna #1). Allows computer to access home WiFi network for Internet access/updates.
-
-
-
Mechanical Specification:
-
Frame: Full 5mm 3k carbon fiber twill
-
Motors: T-MOTOR P2207 V3.0 KV1750 (New with v1.5)
-
ESC: BEHEli-S 20A ESC
-
Propellers: Gemfan 6030-3 (New with v1.5)
-
GPS: Holybro M8N GPS module with new Carbon Fiber Mast
-
Power module: Holybro PM07
-
Wheelbase: 286mm
-
Weight: 893 grams without battery or props
-
Telemetry: ESP8266 connected to flight controller (attached to external antenna #2). Enables wireless connection to the ground station.
-
-
A USB2.0 stick with pre-flashed software provided by Auterion that bundles:
-
Ubuntu 18.04 LTS
-
ROS Melodic
-
Occipital Structure Core ROS driver
-
MAVROS
-
- Assorted cables, 8x propellers, 2x battery straps (installed) and other accessories (these can be used to attach additional peripherals).
- Propeller Guard (Purchased Separately)
PX4 User Guide:
Reference:
PX Vision v1 & v1.5 Difference
For other technical information, please see Holybro Documentation page.
Spare Parts